35
strumento stesso. Le coordinate coincidono con un numero di punti molto elevato perce-
pito dal raggio laser durante il suo movimento. L’insieme dei punti rilevati si definisce “nu-
vola di punti” e corrisponde ad una rappresentazione in forma vettoriale della superficie
esterna dell’oggetto scansionato. Dalla nuvola si ricava infatti, per mezzo del
meshing
, il
modello poligonizzato e quindi un modello virtuale del rilevato ottenuto dalla triangolazio-
ne che consente di riprodurre superfici continue.
Attraverso il raggio di luce polarizzata emesso dalla stazione, il laser scanner determi-
na una misura di distanza in seguito alla definizione di un campo d’azione all’interno di un
preciso settore d’intervento.
Gli apparati di scansione svolgono un’operazione completamente automatica facili-
tando l’esecuzione del rilevamento, perciò al rilevatore compete soprattutto di saper im-
postare informaticamente la scansione e gestirne le fasi.
Esistono due serie di strumenti laser: la prima famiglia racchiude i dispositivi con tec-
nologia a tempo di volo, la seconda quelli a triangolazione. Il laser scanner impiegato in
Sant’Uldarico appartiene alla prima famiglia. L’uso del sistema laser a scansione è tutta-
via recente in ambito di rilievo dell’architettura. Gli strumenti laser sono nati dalla prototi-
pazione rapida industriale, finalizzati alla riproduzione di oggetti e parti meccaniche. Da
pochi anni tuttavia si riconosce la validità di applicazione di queste attrezzature a suppor-
to del rilievo dei beni culturali in relazione alla strumentazione già in uso per il rilevamento
indiretto.
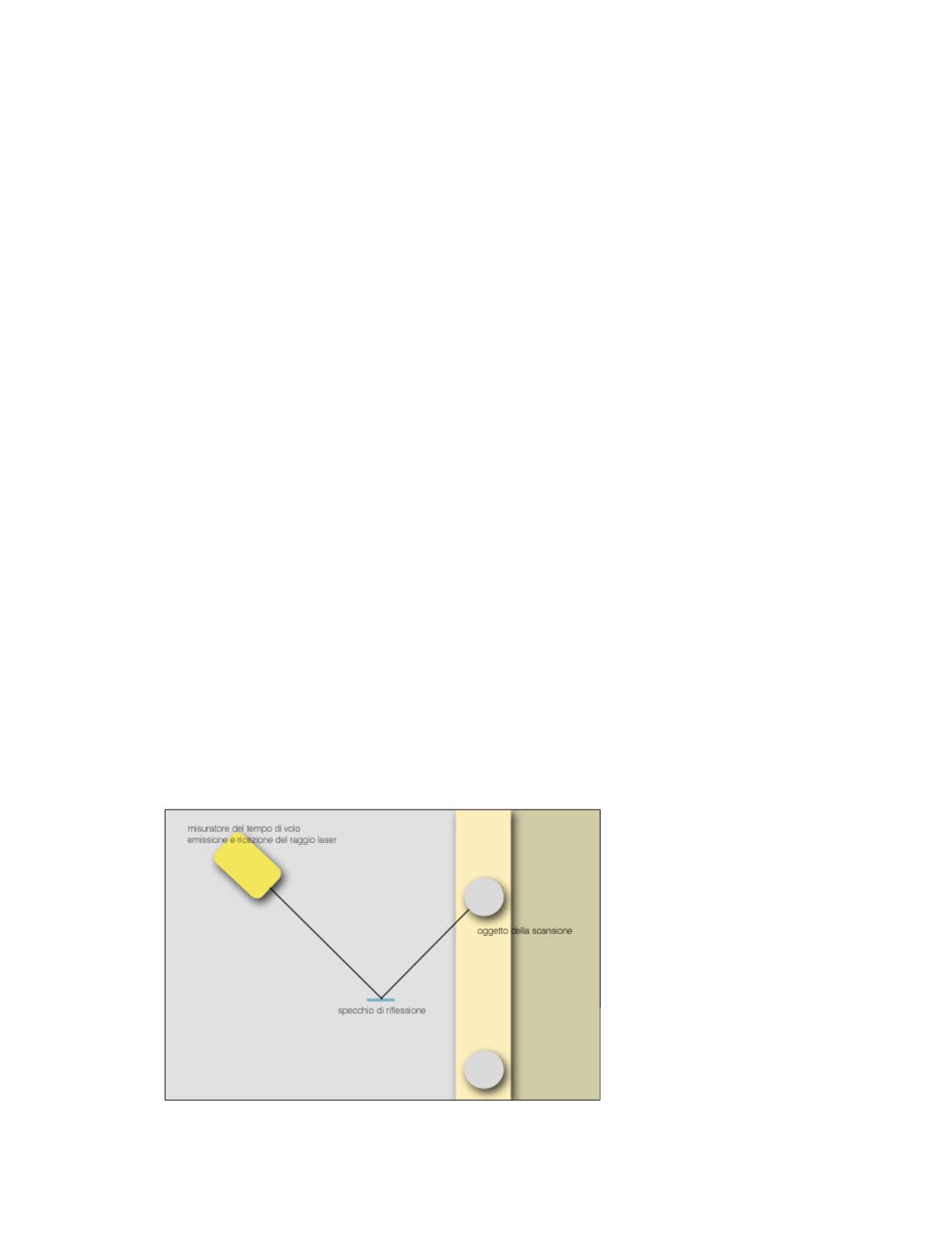
Gli apparati che sfruttano la tecnologia a tempo di volo, o
TOF
da “time of flight” (fig.
1
), si basano sulla misura di distanza e sono nominati per questa ragione
ranging instru-
ments
, analogamente a quanto avviene per i tradizionali distanziometri elettronici.
Fig.
1
– Schema descrittivo
della tecnologia a tempo di vo-
lo applicata alla scansione del
chiostro.


